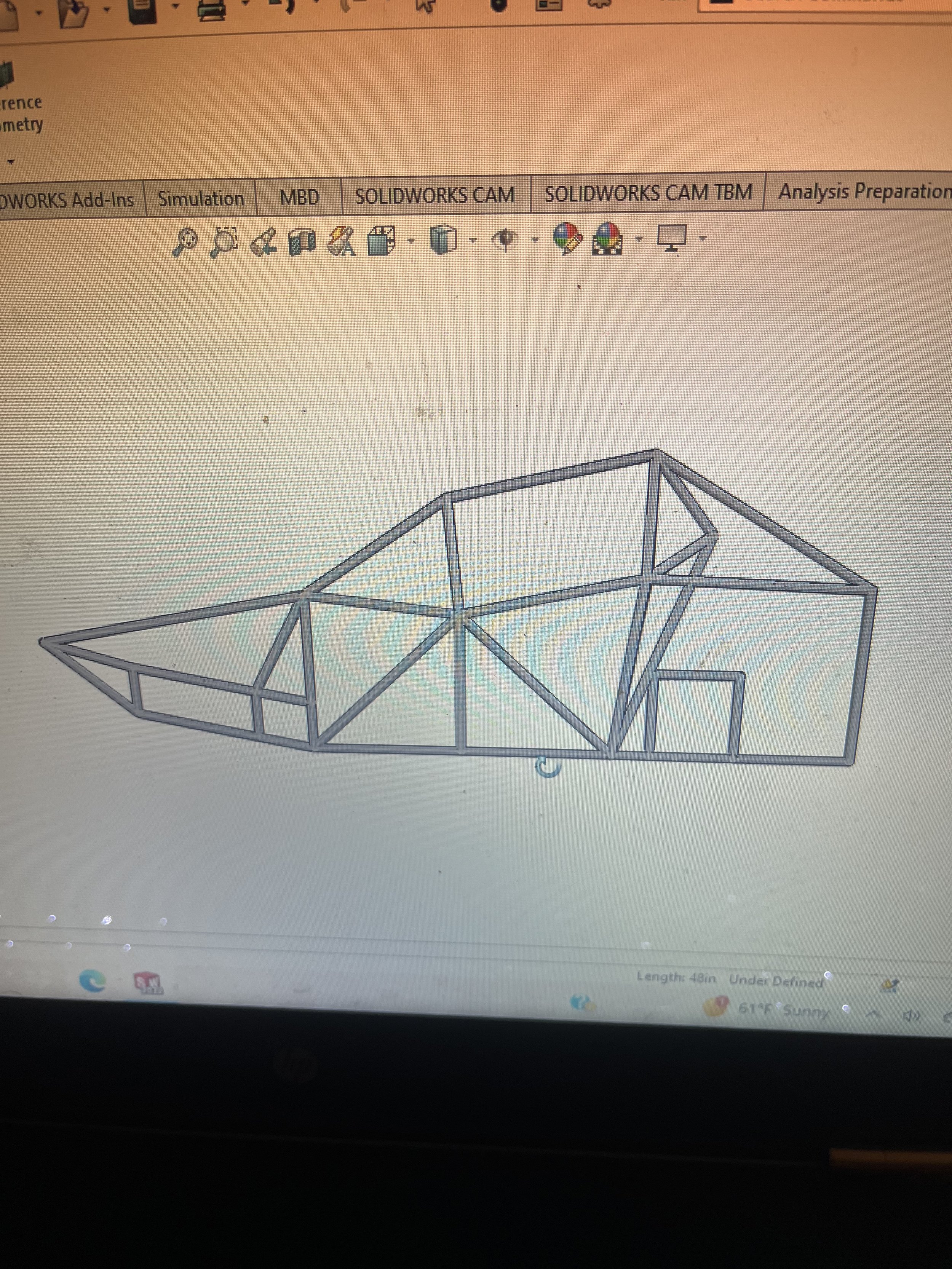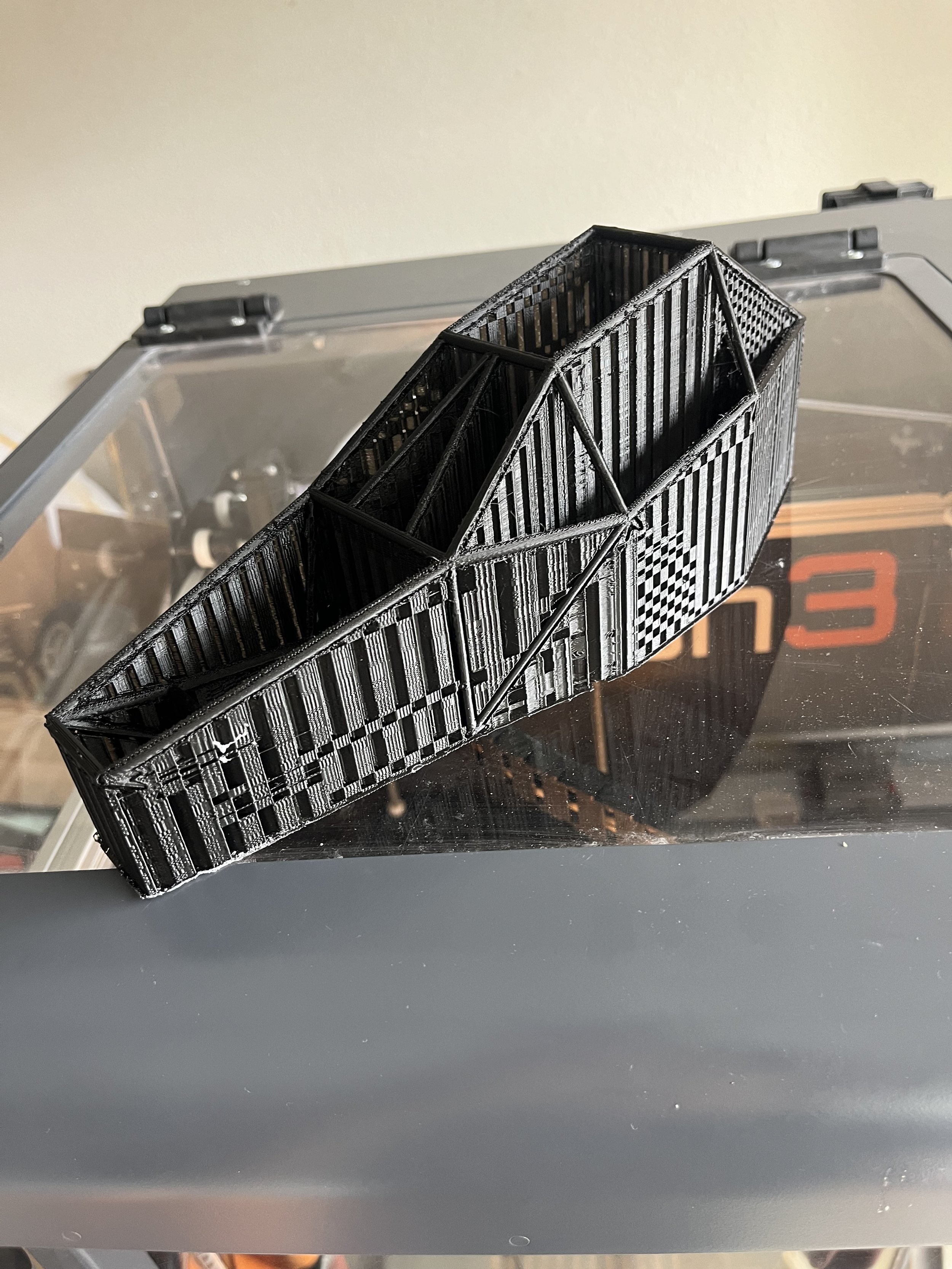
Electric Race buggy (In progress)
This is my (in progress) development of an awd tube frame electric buggy that I will eventually figure out how to maybe run in a SCORE electric class.
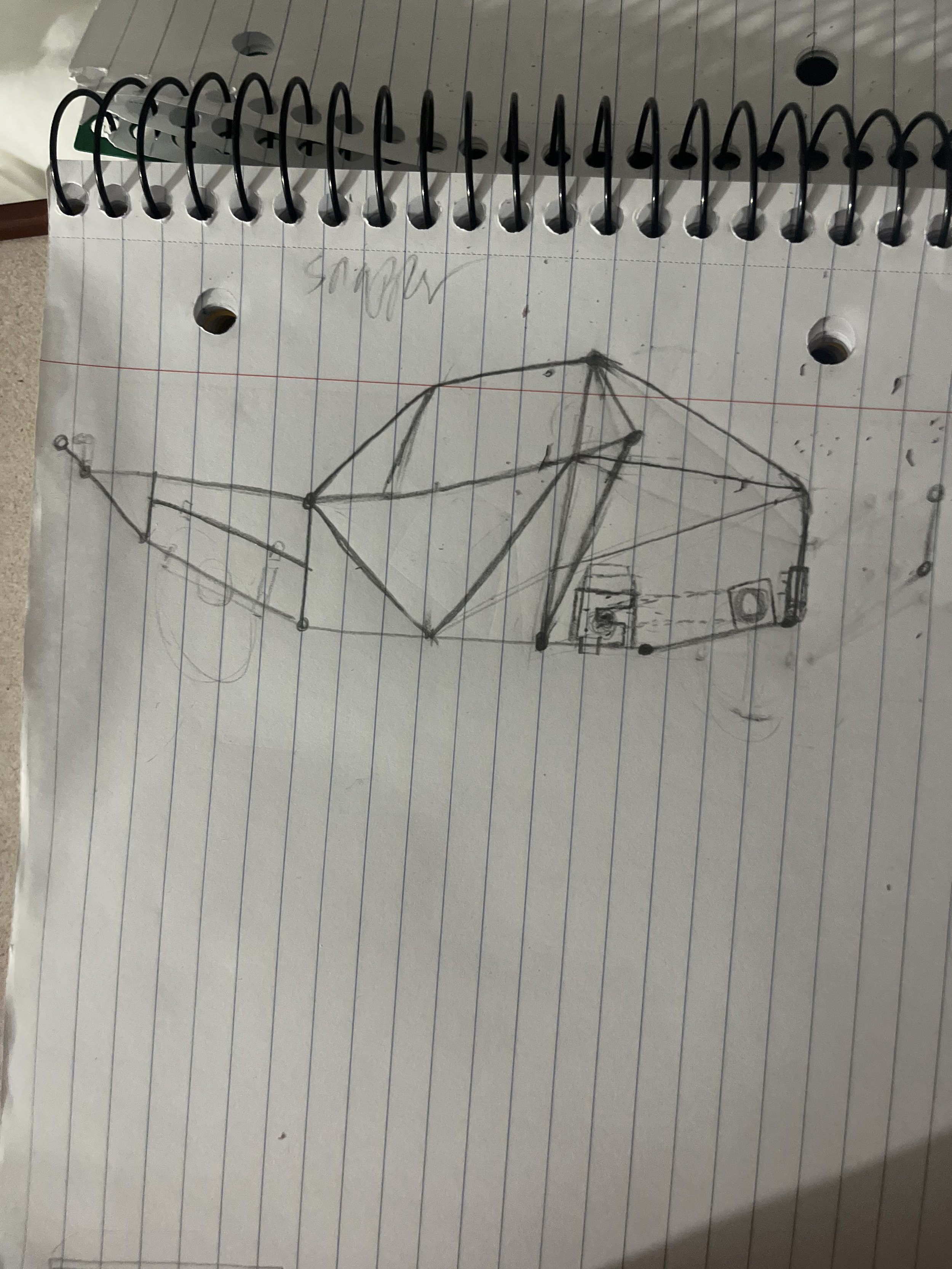
It originally started out as a motorcycle powered rear wheel driven crosskart that I was already purchasing components for. The more I realized what it would cost me, and how much I would be limiting myself with some older designs, the larger the scope of what I really wanted kept getting
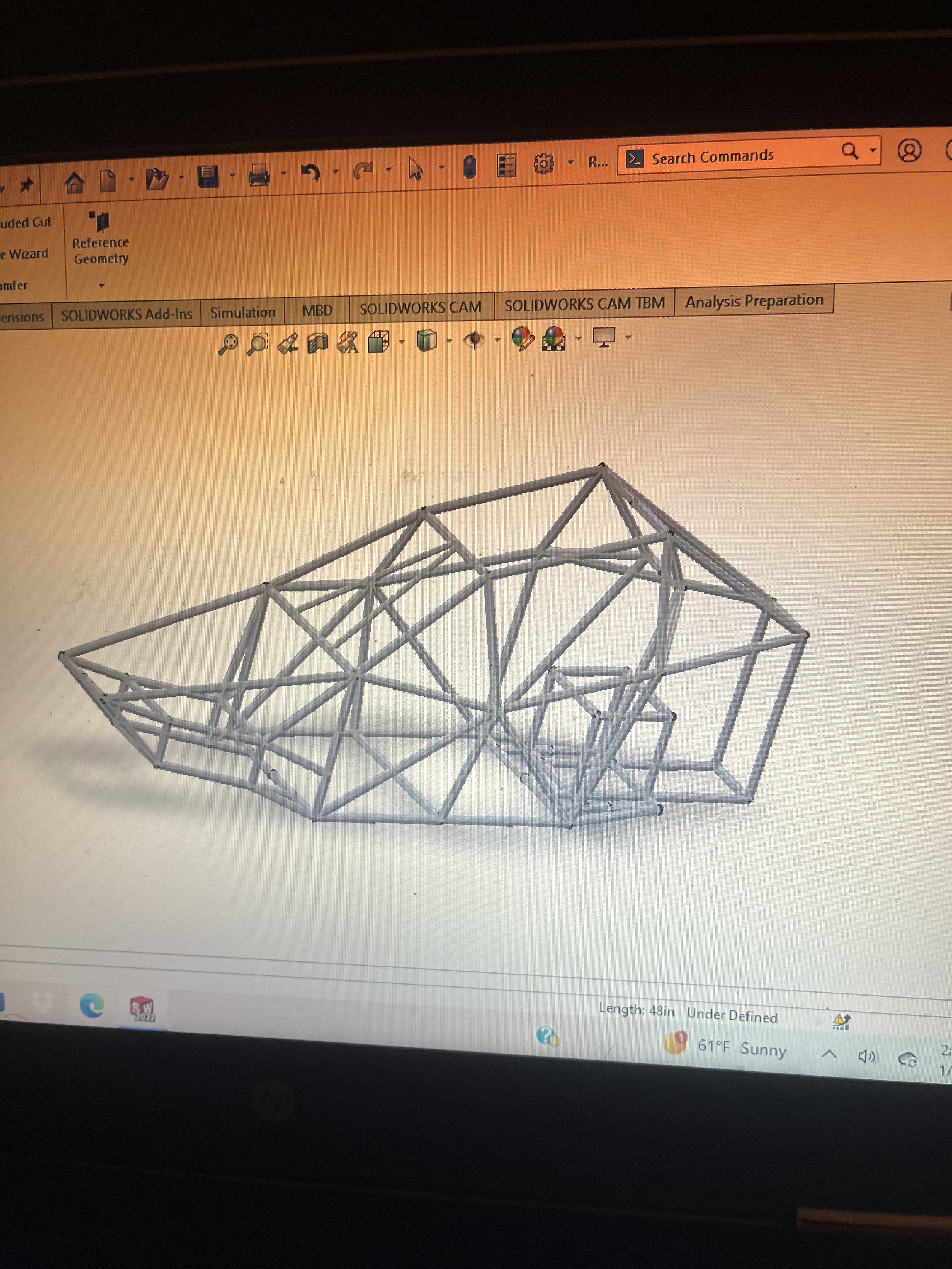
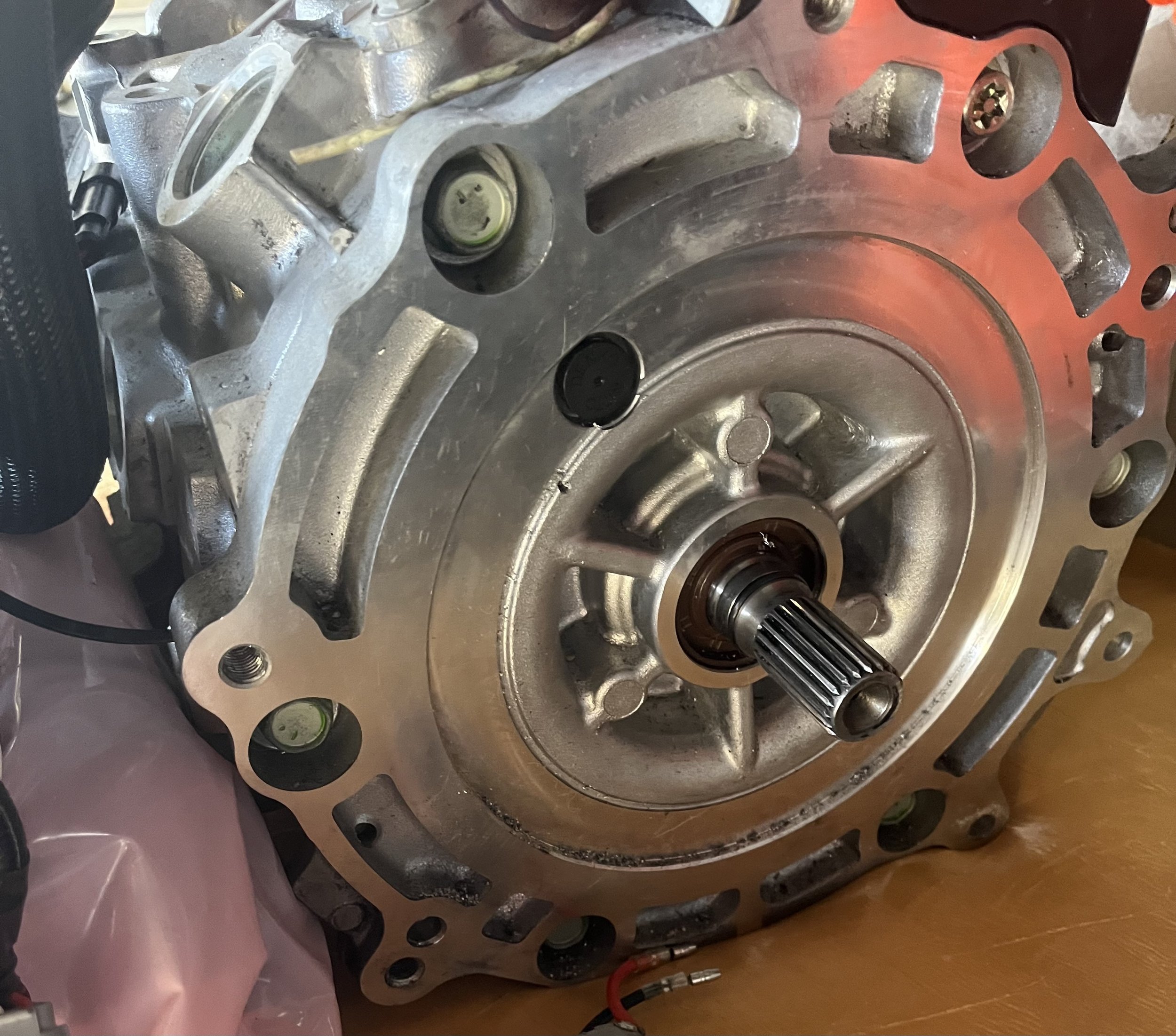
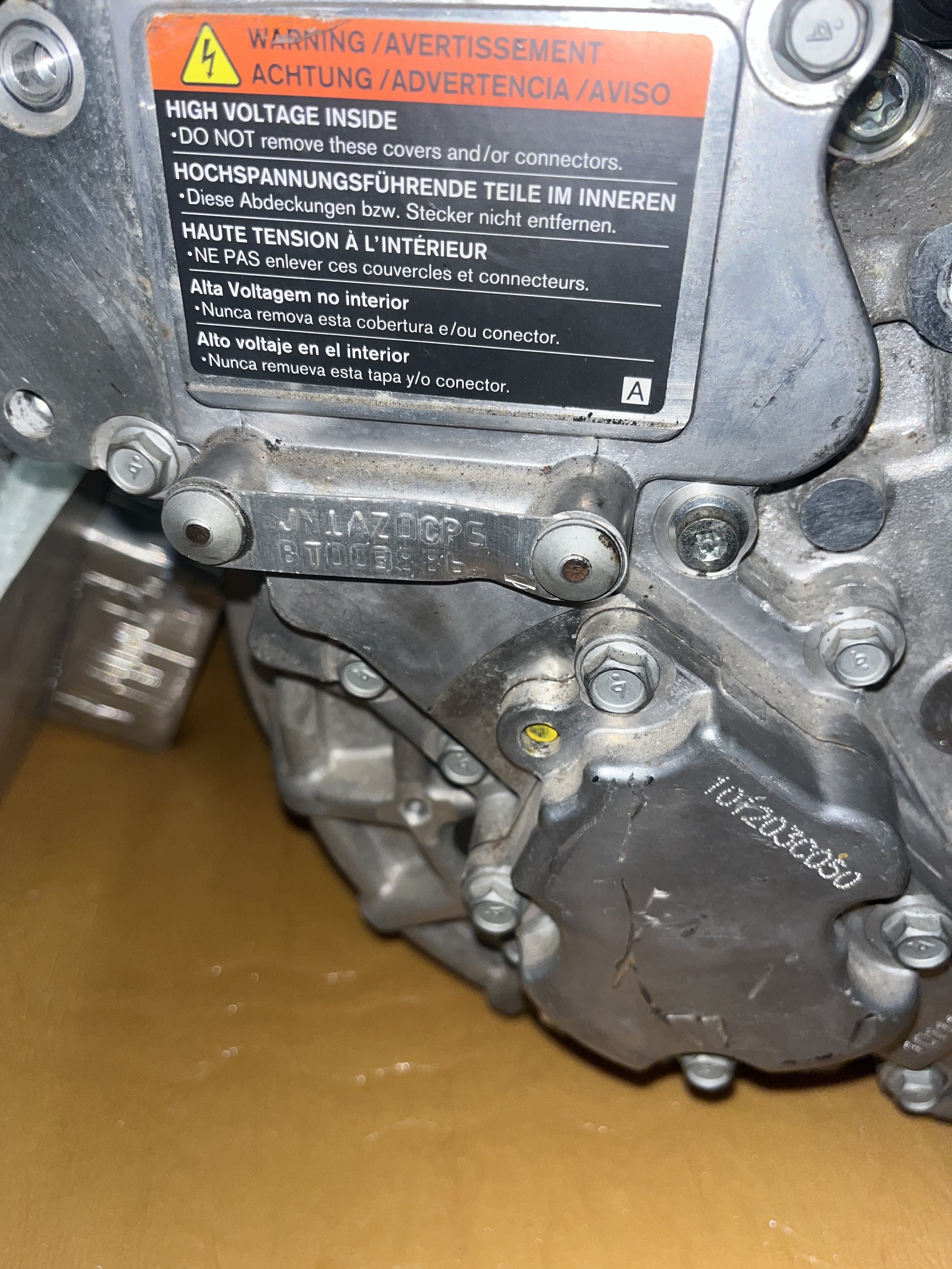
My current “goal” is to build a completely modular chassis that can have individual sections removed should I want to update/replace things such as the suspension geometry or design (double wishbone/Trailing arm/solid axle?) in the future. It will be all wheel drive via a complete Polaris drivetrain (most likely utilizing a Hilliard diff unit in order to swap between rear and all wheel drive). Power will come from a 400 volt Ze0 Nissan leaf motor which has been upgraded with aftermarket components (VCU, BMS, etc.) until I can afford a complete newer unit (or some other form of motor combo that I can redesign the modular chassis sections for).
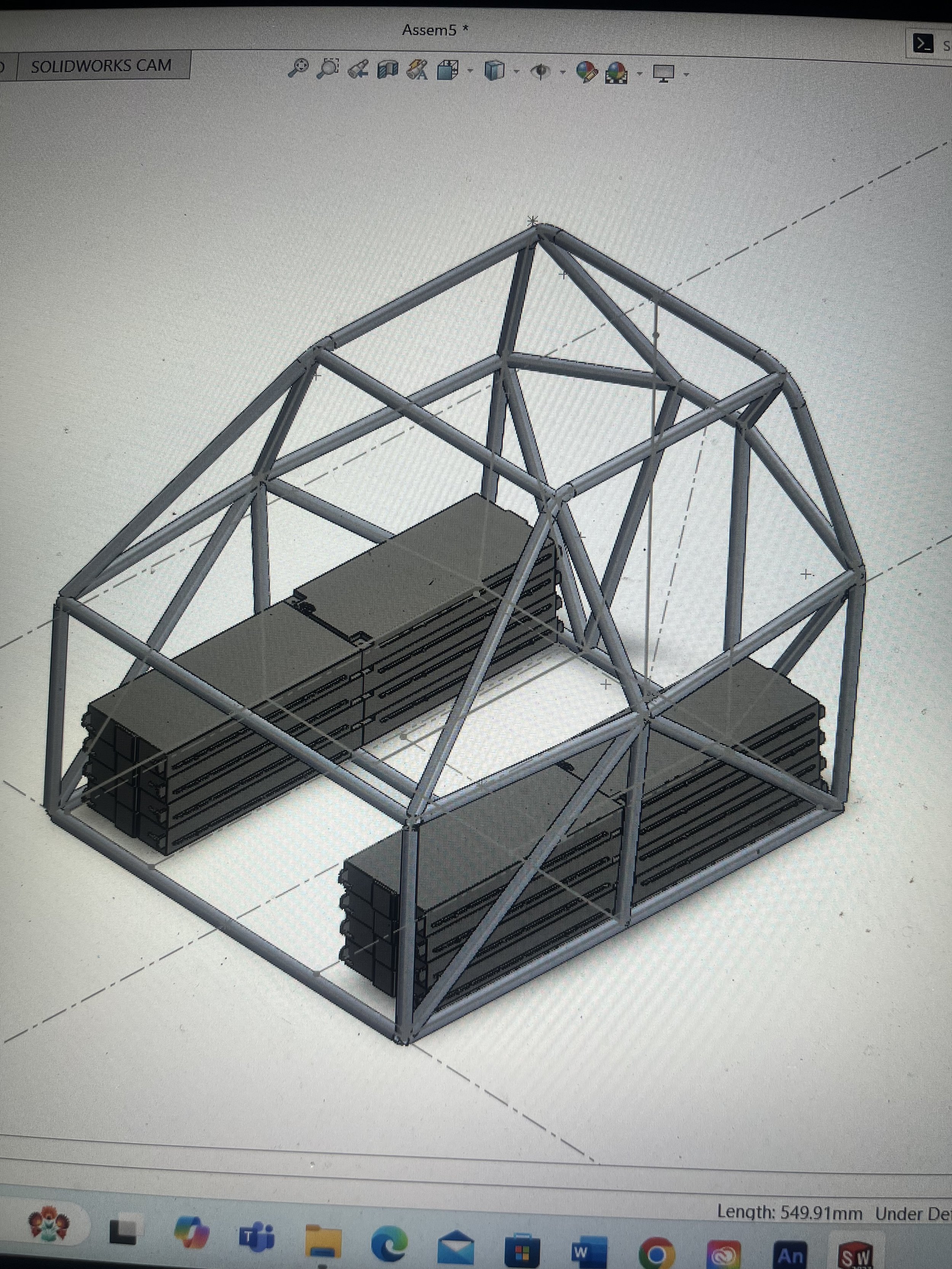
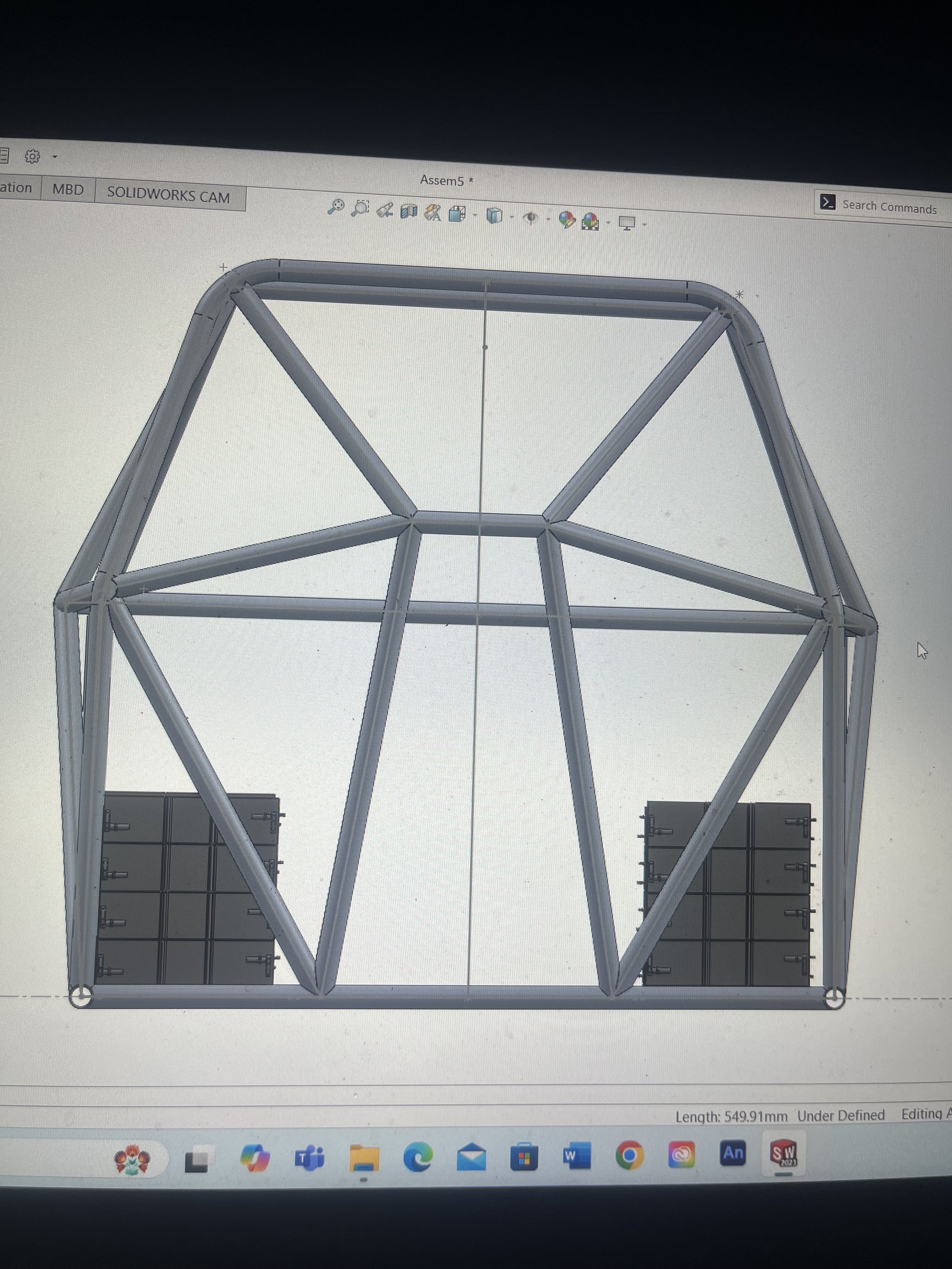
I am in the process of researching effective methods of building a multi gear transfer case which will allow me to optimize my gear ratios for my application. Suspension geometry will be done completely by me using parametric modeling, along with what I have learned on my own, along with my SAE experience designing several different double wishbone setups. Sixteen individual tesla model S batteries will be mounted on either side of the driver (via removable containment sections), along with a full liquid cooling system that will be implemented somewhere on the car that exploits high pressure zones on the eventual body panels I will build out of fiberglass (or carbon if my budget allows).
My (rough) estimation of the vehicle’s dry weight is around 1700 lbs, largely depending on the tube thickness I decide to build with.
…